
Praxistest bestanden: Rostocker Forscher entwickeln Baukastensystem für Unterwasserfahrzeuge
28.01.2021 / ID: 360379
Wissenschaft, Forschung & Technik
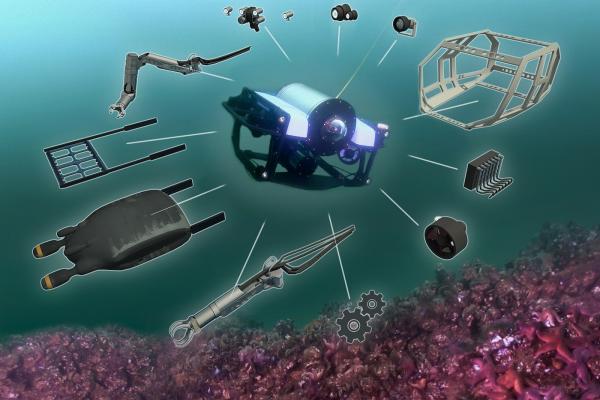 Eine Rostocker Projektgruppe hat ein Baukastensystem für Unterwasserfahrzeuge entwickelt, das aus flexibel kombinierbaren Komponenten besteht. Die modular aufgebauten "Remote Operated Vehicles" (ROVs) bedienen verschiedene Szenarien - ein Novum in der Unterwassertechnologie. Der Prototyp wurde erfolgreich in der Ostsee getestet.
Eine Rostocker Projektgruppe hat ein Baukastensystem für Unterwasserfahrzeuge entwickelt, das aus flexibel kombinierbaren Komponenten besteht. Die modular aufgebauten "Remote Operated Vehicles" (ROVs) bedienen verschiedene Szenarien - ein Novum in der Unterwassertechnologie. Der Prototyp wurde erfolgreich in der Ostsee getestet.Gängige Standard-ROVs sind meist Spezialanfertigungen, welche auf die traditionellen Aufgabenfelder, vor allem in der Öl- und Gasindustrie, ausgelegt sind. Den Fahrzeugen fehlt es an Multifunktionalität - das ist die Meinung der Anwender, deren Feedback Basis für das Projekt "MiRo-Base" war. Neue Aufgabenfelder, die sich durch die steigende Industrialisierung des Ozeans ergeben, erfordern neue Konzepte und Konstruktionsmöglichkeiten. Eine Projektgruppe aus Fraunhofer IGD, FORTecH Software GmbH, SubCtech GmbH, IAV GmbH und Universität Rostock machte sich deshalb daran, ein flexibel aufgebautes System für Unterwasserfahrzeuge zu entwickeln.
Eine neue ROV-Generation
Der modulare Aufbau stellte die Entwicklerinnen und Entwickler vor völlig neue Herausforderungen. Denn der flexible Aufbau des Fahrzeugs erfordert auch flexible Software, damit z.B. neu entwickelte Antriebe überhaupt angesteuert werden können. Die Lösung der Rostocker Softwarefirma FORTecH kann verschiedene Elemente flexibel einbinden, ohne dass die Konfiguration der Ausstattung jedes Mal neu programmiert werden muss. Der Lehrstuhl Regelungstechnik der Universität Rostock entwickelte zusammen mit der IAV GmbH ein völlig neues Regelungssystem, welches sich automatisch an das zusammengebaute Fahrzeug anpasst. Basis dieses intelligenten Reglers ist ein mathematisches Modell der Fahrzeugbewegung, erarbeitet vom Lehrstuhl für Meerestechnik der Universität Rostock. Das Fraunhofer IGD steuert für die neue ROV-Generation eine intelligente Kamera bei. Sie verbessert in Echtzeit Unterwasseraufnahmen, rechnet Trübung, Farbstich, Unschärfe und Lichtbrechungen heraus und macht so das Bild deutlich klarer. Es wird live an den Operator des Unterwasserfahrzeugs übermittelt und hilft so noch während des Tauchgangs bei der Entscheidung über die nächsten Schritte.
Probedurchgang für das neue ROV
Kurz vor Abschluss des vom Bundesministerium für Bildung und Forschung geförderten Projekts wurde einer der beiden Prototypen einem finalen Praxistest unterzogen. In Zusammenarbeit mit dem Landesverband für Unterwasserarchäologie Mecklenburg-Vorpommern e.V. fand ein Test-Tauchgang in ca. 8 m Tiefe zu einem Schiffswrack in der Ostsee vor Warnemünde statt. Der Forschungstaucher Martin Siegel ging gemeinsam mit dem Unterwasserfahrzeug an dem gesunkenen 16 Meter langen Schlepper auf Tauchgang: "Wir waren wirklich positiv überrascht von der Qualität der Unterwasseraufnahmen, was die Kamera bei den schlechten Sichtverhältnissen unter Wasser leistet, ist erstaunlich." Doch auch die Entwickler selbst zeigten sich nach der Probefahrt zufrieden: "Die Bedienung des ROVs war durch die entwickelten Regelungsalgorithmen sehr einfach und ist so auch für weniger erfahrenes Personal möglich", so Thilo Müller, Regelungstechniker an der Universität Rostock und ROV-Pilot während des Tauchgangs. Um die neu entwickelten Funktionen und Geräte zu testen, entwarf die Firma Evologics aus Berlin zusätzlich einen zweiten bionischen Prototyp, der wie eine Schildkröte geformt ist und zeigt, welche neuen ROV-Formen der entwickelte Baukasten ermöglicht.
Wo der Mensch an seine Grenzen stößt, kommt Technik zum Einsatz.
Aber warum braucht es nun einen Unterwasserroboter, für etwas, was bisher doch auch der Mensch leistet? Martin Siegel klärt auf: "Wir kommen häufig an den Punkt, dass wir auf dem Sonar eine Auffälligkeit entdecken, aber dort nicht tauchen können oder nur unter Inkaufnahme gewisser Risiken. Das betrifft das Tauchen in großen Tiefen oder an Fundplätzen, wo kein Aufstieg möglich ist oder eine erhebliche Verhakungsgefahr besteht. Auch die Strömung ist bei der hochwertigen Dokumentation durch Taucher oft eine Herausforderung. Wir bewegen uns grundsätzlich in einem sehr arbeitsfeindlichen Umfeld - durch die Technik können wir Entspannung reinbringen." Doch der Einsatz von Technik bringt auch zeitliche und damit finanzielle Vorteile. Aufwändige Erkundungstauchgänge können durch strikte Regularien der Tauch- und Pausenzeiten nur häppchenweise vorgenommen werden. Ein Fahrzeug dagegen kann so lange tauchen, wie der Akku hält. Ein gutes Stichwort: das neue Mini-ROV verfügt über die neueste Li-Ion Batteriegeneration. Entwickelt durch die Kieler SubCtech GmbH liefert und überwacht die Li-Ion Batterie Energie, und lädt auch unter Wasser automatisch nach. Für wechselnde Einsätze kann sie einfach angepasst werden.
Neue Einsatzmöglichkeiten durch verbesserte Technik
Wird auf dem Sonar eine Auffälligkeit festgestellt, heißt es für die Taucher des Landesverbandes: schnell sein. Im Falle des gesunkenen Holländers vor Warnemünde ging viel Material - das wertvolle Rückschlüsse zur Identität des Schiffs und seinem Untergang ermöglicht hätte - nicht nur durch die Strömung, sondern auch durch Plünderungen verloren. Denkmalstrukturen könnten in Zukunft vor allem in bestimmten Wassertiefen durch den Einsatz von Technik viel schneller erkundet werden als durch Taucher. "Wir erhoffen uns, dass wir mit dem Unterwasserfahrzeug in Bereiche vordringen werden, in die wir ohne technische Unterstützung gar nicht rankommen", fasst Martin Siegel seine Erwartungshaltung an den neuen Teamkollegen zusammen. Im Laufe des Jahres wird die Evologics GmbH die Entwicklungen am Turtle-ROV finalisieren und es anschließend als Produkt auf den Markt bringen. Was die Forschungsarbeit in Rostock angeht - es gibt bereits die nächsten Pläne. "In einem Folgeprojekt wollen wir uns damit befassen, wie ein ROV während eines Tauchgangs mit Hilfe künstlicher Intelligenz eigenhändig die Steuerung übernimmt und beispielsweise ein Wrack selbstständig komplett abtaucht", so Guntram Flach, Projektleiter am Fraunhofer IGD. Die Vision: ein kognitives ROV. Getestet werden könnte es in dem Unterwasser-Testareal "Digital Ocean Lab", das vor der Küste Nienhagens eingerichtet werden soll.
Weiterführende Informationen:
- Mehr zum Projekt MiRo-Base: https://www.igd.fraunhofer.de/projekte/miro-base-system-plattform-fuer-modulare-ferngesteuerte-unterwasserfahrzeuge
- Mehr über Unterwassertechnologien am Fraunhofer IGD: https://www.igd.fraunhofer.de/trends/unterwasserforschung
Remote Operated Vehicles Fraunhofer IGD Rostock Ostsee Forschung Wissenschaft Unterwasserforschung Unterwassertechnologie MiRo-Base FORTecH SubCtech Universität Rostock Meeresforschung
Fraunhofer-Institut für Graphische Datenverarbeitung IGD
Frau Daniela Welling
Fraunhoferstraße 5
64283 Darmstadt
Deutschland
fon ..: +49 6151 155-146
web ..: https://www.igd.fraunhofer.de
email : presse@igd.fraunhofer.de
Pressekontakt
Fraunhofer-Institut für Graphische Datenverarbeitung IGD
Frau Daniela Welling
Fraunhoferstraße 5
64283 Darmstadt
fon ..: +49 6151 155-146
web ..: https://www.igd.fraunhofer.de
email : presse@igd.fraunhofer.de
Diese Pressemitteilung wurde über Connektar veröffentlicht.
Für den Inhalt der Pressemeldung/News ist allein der Verfasser verantwortlich. Newsfenster.de distanziert sich ausdrücklich von den Inhalten Dritter und macht sich diese nicht zu eigen.
Empfehlung | devASpr.de
Kostenlos Artikel auf newsfenster.de veröffentlichen
Kostenlos Artikel auf newsfenster.de veröffentlichen
Weitere Artikel von Frau Daniela Welling
24.11.2022 | Frau Daniela Welling
Absortierprozesse beschleunigen und Genauigkeit erhöhen mit neuer Software des Fraunhofer IGD
Absortierprozesse beschleunigen und Genauigkeit erhöhen mit neuer Software des Fraunhofer IGD
17.11.2022 | Frau Daniela Welling
Detektion von Munitionsaltlasten - Fraunhofer IGD erweitert Digital Ocean Lab um UXO-Garten
Detektion von Munitionsaltlasten - Fraunhofer IGD erweitert Digital Ocean Lab um UXO-Garten
10.11.2022 | Frau Daniela Welling
24h-EKG war gestern - App des Fraunhofer IGD erkennt früher Herzerkrankungen
24h-EKG war gestern - App des Fraunhofer IGD erkennt früher Herzerkrankungen
08.09.2022 | Frau Daniela Welling
Fraunhofer IGD visualisiert historischen Zustand des Klosters Corvey mittels Augmented Reality
Fraunhofer IGD visualisiert historischen Zustand des Klosters Corvey mittels Augmented Reality
28.07.2022 | Frau Daniela Welling
Innovation im 3D-Druck - Neues Verfahren des Fraunhofer IGD verhindert Treppenstufenartefakte
Innovation im 3D-Druck - Neues Verfahren des Fraunhofer IGD verhindert Treppenstufenartefakte
Weitere Artikel in dieser Kategorie
23.07.2026 | Kompetenzzentrum WIRKsam
Neue WIRKsam-Broschüre zur Fokussierungsphase
Neue WIRKsam-Broschüre zur Fokussierungsphase
23.07.2026 | Anton Paar Germany GmbH
Julia DSC: Neue Maßstäbe in der Differenzkalorimetrie
Julia DSC: Neue Maßstäbe in der Differenzkalorimetrie
22.07.2026 | Core Technologie GmbH
Neuer CAD-Konverter für den digitalen roten Faden
Neuer CAD-Konverter für den digitalen roten Faden
21.07.2026 | Ferrari Industrieventilatoren GmbH
Ferrari Industrieventilatoren GmbH bietet ErP 2026-ready Ventilatorlösungen für die erweiterten EU-Anforderungen
Ferrari Industrieventilatoren GmbH bietet ErP 2026-ready Ventilatorlösungen für die erweiterten EU-Anforderungen
21.07.2026 | CIC
Prepreg-Spezialist CIC erfolgreich nach EN 9100 zertifiziert
Prepreg-Spezialist CIC erfolgreich nach EN 9100 zertifiziert
